




标题:RG2实时控制力解析:技术革新与实际应用
随着科技的飞速发展,机器人技术逐渐成为各行各业的重要支撑。其中,RG2实时控制力作为机器人领域的一项关键技术,正逐渐受到广泛关注。本文将从RG2实时控制力的定义、技术原理、实际应用等方面进行深入探讨。
一、RG2实时控制力的定义
RG2实时控制力是指机器人系统在执行任务过程中,实时调整和控制自身运动状态,以适应外部环境变化的能力。它主要涉及机器人动力学、控制理论、传感器技术等多个领域。RG2实时控制力在提高机器人适应性和稳定性方面具有重要意义。
二、RG2实时控制力的技术原理
-
动力学建模:通过对机器人进行精确的动力学建模,可以计算出机器人各个关节的运动状态,为实时控制提供依据。
-
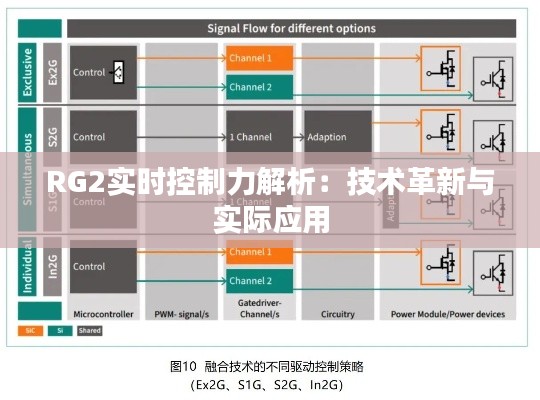
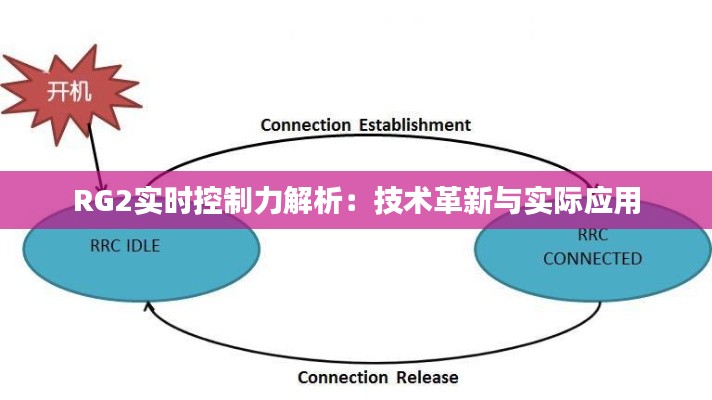
控制算法:根据动力学模型,设计合适的控制算法,使机器人能够实时调整运动状态。常见的控制算法有PID控制、自适应控制、鲁棒控制等。
-
传感器技术:传感器技术是RG2实时控制力的关键,它能够实时获取机器人运动状态和外部环境信息。常见的传感器有陀螺仪、加速度计、力传感器等。
-
信息融合:将来自不同传感器的信息进行融合,提高控制精度和鲁棒性。
三、RG2实时控制力的实际应用
-
工业自动化:在工业自动化领域,RG2实时控制力可以应用于装配、焊接、搬运等环节,提高生产效率和产品质量。
-
医疗康复:在医疗康复领域,RG2实时控制力可以用于辅助患者进行康复训练,提高康复效果。
-
服务机器人:在服务机器人领域,RG2实时控制力可以应用于家庭服务、养老护理、特殊环境作业等场景,提高机器人的人性化程度。
-
智能交通:在智能交通领域,RG2实时控制力可以应用于自动驾驶汽车,提高行驶安全性和稳定性。
四、总结
RG2实时控制力作为机器人领域的一项关键技术,具有广泛的应用前景。随着技术的不断发展和完善,RG2实时控制力将在工业、医疗、服务、交通等领域发挥越来越重要的作用。未来,我国应加大研发投入,推动RG2实时控制力技术取得更大突破,为我国机器人产业发展贡献力量。
(文章总字数:815字)
转载请注明来自北京凯建昌盛工程技术有限公司,本文标题:《RG2实时控制力解析:技术革新与实际应用》






 京ICP备19050683号-2
京ICP备19050683号-2